Robot Operating System to nie system operacyjny w klasycznym sensie, tylko ekosystem bibliotek, narzędzi i interfejsów, który pozwala budować aplikacje robotyczne z mniejszych, wymiennych elementów. W praktyce łączy sterowniki czujników, logikę planowania, percepcję, nawigację i kontrolę ruchu w spójną całość. Dla osób z backendu i DevOps to ważny temat, bo ROS przypomina rozproszony system usług bardziej niż pojedynczą aplikację.
W tym artykule pokazuję, jak działa ROS, czym różni się od klasycznego oprogramowania backendowego, kiedy warto wybrać ROS 2 i gdzie zaczynają się ograniczenia. Dorzucam też praktyczne wskazówki, które pomagają uniknąć najczęstszych błędów przy pierwszym wdrożeniu.
Najważniejsze fakty o ROS w kilku zdaniach
- ROS to warstwa integracyjna dla robotów, nie klasyczny system operacyjny.
- Komunikacja opiera się na node’ach, topicach, usługach, akcjach i parametrach.
- W 2026 dla nowych projektów najbezpieczniej patrzeć na ROS 2, a oficjalna dokumentacja wskazuje Jazzy Jalisco jako LTS.
- Dla backendu i DevOps największe znaczenie mają zależności, kontenery, testy, sieć i obserwowalność.
- ROS działa najlepiej tam, gdzie robot musi łączyć sensory, planowanie i ruch w jednym środowisku.
Jak rozumieć ROS bez technicznego żargonu
Ja traktuję ROS jak zestaw klocków do budowania oprogramowania dla robotów. Jeden klocek zbiera dane z kamery, drugi liczy pozycję, trzeci planuje ruch, czwarty wysyła komendy do silników. Zamiast pisać wszystko od zera, składasz system z komponentów, które komunikują się według wspólnych reguł.
To właśnie odróżnia ROS od zwykłej biblioteki. W typowym projekcie backendowym biblioteka dodaje funkcję do aplikacji. W ROS dostajesz cały model współpracy między procesami, urządzeniami i językami programowania. Dlatego dokumentacja oficjalnie opisuje go jako ekosystem open source z frameworkiem, narzędziami i bibliotekami do tworzenia aplikacji robotycznych.
Najważniejsza konsekwencja jest prosta: jeśli w robocie coś ma się zmieniać bez przebudowy całego systemu, ROS daje do tego sensowną strukturę. To prowadzi nas do architektury komunikacji, bo właśnie tam widać jego przewagę.
Jak działa architektura ROS w praktyce
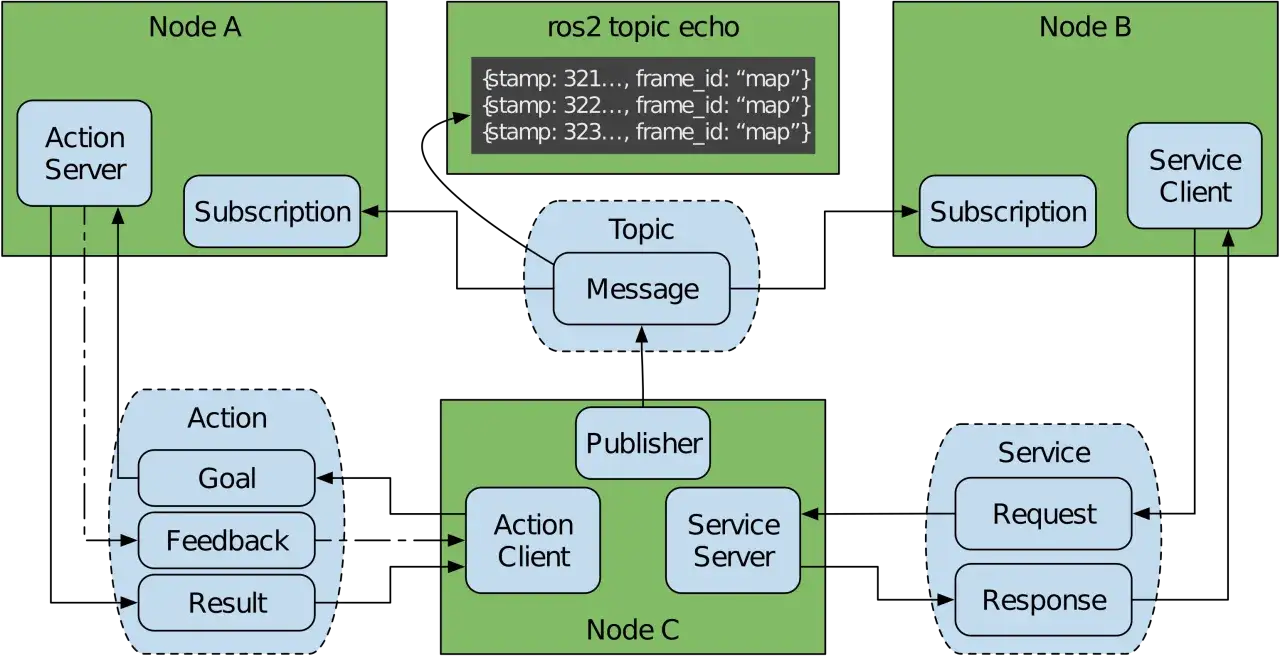
Rdzeniem ROS są node’y, czyli małe procesy o jednym, jasno określonym zadaniu. Jeden node może publikować dane z czujnika, inny je przetwarzać, a kolejny sterować ruchem. To bardzo przypomina mikroserwisy, tylko zamiast API HTTP masz wyspecjalizowane mechanizmy wymiany danych.
W ROS 2 najczęściej spotkasz trzy formy komunikacji: topics, services i actions. Każda służy do czego innego, a zła decyzja projektowa zwykle mści się później w debugowaniu i opóźnieniach.
| Mechanizm | Kiedy go używać | Jak działa | Praktyczny przykład |
|---|---|---|---|
| Topics | Gdy dane płyną cały czas | Publikacja i subskrypcja, asynchronicznie | Strumień z kamery, odczyt z lidaru, pozycja robota |
| Services | Gdy potrzebujesz szybkiej odpowiedzi | Żądanie i odpowiedź, synchronicznie | Włączenie trybu pracy, pobranie konfiguracji, prosty query |
| Actions | Gdy zadanie trwa dłużej i chcesz postęp | Cel, feedback i wynik | Dojedź do punktu, wykonaj mapowanie, rozpakuj paczkę |
Do tego dochodzą packages, czyli logiczne paczki kodu, oraz workspace, gdzie składasz cały projekt. W praktyce to właśnie od struktury pakietów zależy, czy projekt da się utrzymać po kilku miesiącach, czy zamienia się w zbiór przypadkowych skryptów. Jeśli pracujesz w Pythonie, szybko trafisz na rclpy, a w projektach wydajnościowych często pojawia się też rclcpp.
Ten model komunikacji wygląda znajomo dla osób z backendu, ale ma jedną ważną różnicę: tutaj sieć, czas reakcji i niezawodność są częścią samej architektury, a nie dodatkiem na końcu. To właśnie dlatego DevOps w ROS ma więcej sensu, niż mogłoby się wydawać.
Dlaczego backend i DevOps powinny znać ROS
W projektach robotycznych największym wyzwaniem nie jest sam algorytm, tylko to, żeby cały system działał powtarzalnie na różnych maszynach, w różnych warunkach i z różnym sprzętem. To bardzo backendowe myślenie: zależności, wersje, kolejność startu usług, logi, monitoring i odporność na awarie.
Ja zawsze patrzę na ROS przez pryzmat wdrożeń. Jeśli robota budujesz lokalnie, testujesz w symulatorze i uruchamiasz na edge komputerze, potrzebujesz środowiska, które da się odtworzyć. Konteneryzacja pomaga, ale nie załatwia wszystkiego, bo dojdą jeszcze dostęp do urządzeń USB, GPU, kamer, sieci lokalnej i komunikacji między procesami. Dlatego Docker w ROS jest użyteczny, ale nie magiczny.
- CI/CD ma tu sens, bo możesz automatycznie uruchamiać testy jednostkowe, linting i część testów integracyjnych na symulacji.
- Obserwowalność jest krytyczna, bo robot bez dobrych logów i diagnostyki staje się czarną skrzynką.
- Reprodukowalność zależy od wersji pakietów, obrazu systemu i middleware, więc pinowanie zależności naprawdę ma znaczenie.
- Sieć potrafi zmienić zachowanie całego systemu, zwłaszcza gdy komunikacja między node’ami odbywa się na różnych maszynach.
- Bezpieczeństwo nie jest dodatkiem, bo w ROS 2 komunikacja opiera się o warstwę middleware, a polityki dostępu i szyfrowanie trzeba świadomie skonfigurować.
W praktyce najwięcej zyskuje zespół, który myśli o robocie jak o produkcyjnym systemie rozproszonym, a nie jak o jednorazowym demo. To naturalnie prowadzi do pytania, którą wersję ROS wybrać dziś, bo różnica między nimi jest większa, niż sugeruje sama nazwa.
ROS 1 i ROS 2 nie są tym samym wyborem
ROS 1 i ROS 2 mają wspólną historię, ale inny status projektowy. ROS 1 jest dziś rozwiązaniem legacy, a ROS 2 pozostaje aktywnie rozwijanym kierunkiem. W oficjalnej dokumentacji to właśnie ROS 2 jest wskazywany jako bieżąca, rozwijana wersja, a w 2026 najbezpieczniejszym punktem startu dla nowych projektów jest gałąź LTS.
| Kryterium | ROS 1 | ROS 2 |
|---|---|---|
| Status projektu | Legacy | Aktywnie rozwijany |
| Komunikacja | Starszy stos oparty na własnym mechanizmie ROS | Warstwa middleware z abstrakcją RMW, zwykle nad DDS |
| Bezpieczeństwo | Ograniczone lub dodatkowo dogrywane | Wbudowane mechanizmy bezpieczeństwa na poziomie middleware |
| Wieloplatformowość | W praktyce bardziej historyczna niż strategiczna | Lepsze wsparcie dla różnych platform i dystrybucji |
| Nowe projekty | Tylko jeśli utrzymujesz stary ekosystem | Najczęstszy wybór do nowych wdrożeń |
Nie powiedziałbym jednak, że ROS 1 jest „zły”. Jeśli utrzymujesz istniejący system, migracja bywa kosztowna i nie zawsze opłacalna od razu. Do nowych wdrożeń patrzyłbym jednak przede wszystkim na ROS 2, bo daje lepszy model komunikacji, lepsze bezpieczeństwo i sensowniejsze podstawy pod nowoczesne deploymenty. W tym samym duchu warto wiedzieć, gdzie ROS naprawdę błyszczy, a gdzie lepiej nie oczekiwać cudów.
Gdzie ROS sprawdza się najlepiej, a gdzie zaczynają się ograniczenia
Najlepsze efekty widzę tam, gdzie robot musi łączyć kilka warstw naraz: odczyt czujników, lokalizację, planowanie ruchu, sterowanie i integrację z innymi systemami. To dlatego ROS dobrze pasuje do robotów mobilnych, systemów magazynowych, manipulatorów przemysłowych, autonomicznych platform badawczych i aplikacji z mocnym komponentem percepcyjnym.
Jednocześnie są ograniczenia, o których warto mówić wprost. ROS nie usuwa problemów sprzętowych, nie gwarantuje deterministycznego czasu reakcji w każdej konfiguracji i nie rozwiązuje za Ciebie integracji z każdym producentem sterowników. Jeśli projekt wymaga bardzo niskich opóźnień albo twardych real-time constraints, zwykle kończy się na architekturze hybrydowej: ROS do orkiestracji, a krytyczne pętle sterowania w C++ lub na kontrolerach niższego poziomu.
- ROS świetnie nadaje się do orkiestracji, integracji i pracy z wieloma źródłami danych.
- Nie jest idealny do każdego fragmentu pętli sterowania, zwłaszcza tam, gdzie liczy się skrajnie małe opóźnienie.
- Wersje pakietów i sterowników trzeba sprawdzać bardzo dokładnie, bo kompatybilność między dystrybucjami bywa realnym problemem.
- Symulacja pomaga, ale nie zastępuje testów na docelowym sprzęcie.
- Jeśli używasz Pythona, ROS dobrze nadaje się do logiki wysokiego poziomu, ale nie zawsze do najcięższych obliczeń w czasie rzeczywistym.
Ta uczciwa lista ograniczeń jest ważna, bo pozwala uniknąć rozczarowania już po pierwszym prototypie. A skoro mamy już obraz plusów i minusów, zostaje praktyka: jak zacząć tak, żeby nie utknąć na konfiguracji.
Jak zacząć z ROS bez marnowania czasu
Jeśli zaczynałbym dziś od zera, postawiłbym na ROS 2, najlepiej w środowisku zgodnym z oficjalnie wspieraną platformą. W praktyce najrozsądniejszy start to Linux, najczęściej Ubuntu LTS, bo tam ekosystem jest najmniej problematyczny i najlepiej opisany.
- Zacznij od zrozumienia node’ów i komunikacji przez topics, services oraz actions.
- Uruchom prosty przykład w symulatorze, zanim podłączysz prawdziwy sprzęt.
- Pracuj na jednej, jasno określonej dystrybucji ROS 2 i nie mieszaj przypadkowo pakietów z różnych gałęzi.
- Od początku trzymaj projekt w kontenerze albo przynajmniej w powtarzalnym środowisku developerskim.
- Dodaj testy, logowanie i narzędzia diagnostyczne, zamiast odkładać to „na później”.
- Jeśli używasz Pythona, rozdziel warstwę sterowania wysokiego poziomu od cięższych obliczeń, które lepiej przenieść niżej.
Na dziś oficjalna dokumentacja ROS 2 wskazuje Jazzy Jalisco jako najnowszą dystrybucję LTS, więc to sensowny punkt odniesienia przy nowych projektach. Gdy zależy Ci na stabilności, taki wybór zwykle daje mniej niespodzianek niż gonienie za najnowszymi zmianami tylko dlatego, że są świeże.
Najbardziej praktyczna lekcja jest taka: ROS nie wygrywa samą nazwą ani listą funkcji, tylko tym, że porządkuje komunikację i integrację w złożonym systemie robotycznym. Jeśli podejdziesz do niego jak do rozproszonego backendu dla świata fizycznego, dużo szybciej zrozumiesz, gdzie daje przewagę, a gdzie wymaga dodatkowej inżynierii.